
Framtidens teknologi för uppkopplade bilar förenar verkliga och virtuella världar för att hjälpa förarna att ”se det osynliga”
 På den kommande fackmässan CES kommer Nissan att presentera sin framtidsvision av en bil som hjälper föraren att ”se det osynliga”, genom att förena både verkliga och virtuella världar och skapa den ultimata upplevelsen i en uppkopplad bil.
På den kommande fackmässan CES kommer Nissan att presentera sin framtidsvision av en bil som hjälper föraren att ”se det osynliga”, genom att förena både verkliga och virtuella världar och skapa den ultimata upplevelsen i en uppkopplad bil.
Invisible-to-Visible, eller I2V, är en framtidsteknologi som skapats inom Nissan Intelligent Mobility, företagets vision för att förändra hur våra bilar körs, drivs och integreras med samhället. I2V kommer att visa framtidens bilkörning för besökarna på CES i form av en interaktiv, tredimensionell, intensiv upplevelse i Nissans monter.
I2V kommer att hjälpa föraren genom att sammanföra information från sensorer på utsidan och insidan av bilen med data från molnet. Det gör att systemet inte bara kan spåra bilens omedelbara omgivning, utan också förutse vad som kan komma att hända framför bilen – till och med visa vad som finns bakom en byggnad eller runt hörnet. För att göra det ännu roligare att köra vägleds föraren på ett interaktivt och mänskligt sätt, som till exempel via avatarer som visar sig inne i bilen.
Genom att ge sig in i den virtuella världen öppnar I2V upp oändliga möjligheter för tjänster och kommunikation, som gör bilkörningen ännu mer bekväm och spännande.
”Genom att I2V hjälper dig att se det osynliga känner du dig tryggare”, säger Tetsuro Ueda, en av de ledande experterna på Nissan Research Center. ”De interaktiva funktionerna skapar en upplevelse som är skräddarsydd efter dina intressen och din körstil, så att alla kan använda systemet på sitt eget sätt.”
Uppkopplad bilkörning som aldrig förr
 I2V drivs av Nissans Omni-Sensing-teknologi, som fungerar som en hub som samlar realtidsdata från trafikmiljön och från bilens omgivning samt interiör. Nissans SAM-teknologi (Seamless Autonomous Mobility) analyserar gatumiljön via relevant realtidsinformation och förarassistanssystemet ProPILOT, som är delvis självkörande, ger information om bilens omgivning.
I2V drivs av Nissans Omni-Sensing-teknologi, som fungerar som en hub som samlar realtidsdata från trafikmiljön och från bilens omgivning samt interiör. Nissans SAM-teknologi (Seamless Autonomous Mobility) analyserar gatumiljön via relevant realtidsinformation och förarassistanssystemet ProPILOT, som är delvis självkörande, ger information om bilens omgivning.
Teknologin kartlägger en 360-graders virtuell yta runt bilen för att leverera information om sådant som status när det gäller vägar och korsningar, sikt, signaler och fotgängare som befinner sig nära bilen. Systemet kan också övervaka människorna inne i bilen via invändiga sensorer för att bättre kunna förutsäga när människorna kan behöva assistans med att hitta någonting eller en kaffepaus för att hålla sig pigga.
I2V kan också koppla ihop föraren och passagerarna med människor i Metaverse virtuella värld. Detta gör det möjligt för familj, vänner och andra att dyka upp inne i bilen som tredimensionella, verklighetstrogna avatarer som kan vara som sällskap eller vara till hjälp.
Bättre stöd under självkörande eller manuell körning
 Under självkörande körning kan I2V göra tiden som tillbringas i bilen mer komfortabel och underhållande. Om man till exempel kör i regn kan utsikten under en solig dag projiceras inne i bilen.
Under självkörande körning kan I2V göra tiden som tillbringas i bilen mer komfortabel och underhållande. Om man till exempel kör i regn kan utsikten under en solig dag projiceras inne i bilen.
När man besöker en ny plats kan systemet söka inom Metavers efter en kunnig lokal guide, som kan kommunicera med människorna inne i bilen i realtid.
Information som lämnas av guiden kan samlas in med Omni-Sensing och lagras i molnet, så att andra som besöker samma plats kan få tillgång till denna praktiska guidning. Den kan också användas av det artificiella intelligenssystemet i bilen för att framföra och styra bilen mer effektivt genom lokala områden.
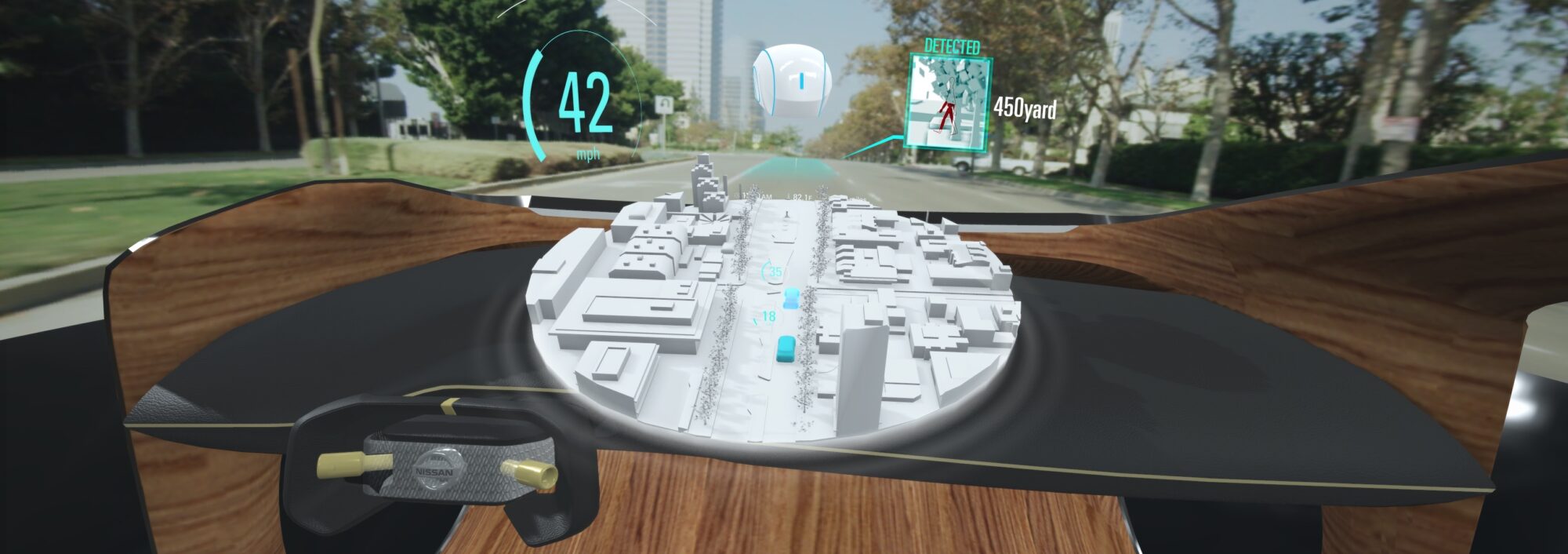
Vid manuell körning presenterar I2V information från Omni-Sensing som en överliggande bild i förarens synfält. Informationen hjälper föraren att bedöma och förbereda sig för sådant som hörn med dålig sikt, avvikande förhållanden i vägbanan eller mötande trafik.
Föraren kan också boka en professionell förare från Metaverse för att få personliga instruktioner i realtid. Den professionella föraren dyker upp som en projicerad avatar eller som en virtuell, framförvarande bil, som visas i förarens synfält för att demonstrera det bästa sättet att köra.
I2V visar inte bara information om trafikstockningar och uppskattade restider, utan kan också informera om unika detaljer för att ge föraren bättre fakta om vägen längre fram, så att föraren slipper oroa sig och kan känna sig lugnare bakom ratten. I2V ger alternativa förslag, till och med om vilken fil föraren ska välja för att ta sig fram snabbast vid trafikstockningar, genom att använda lokal kartinformation i realtid via Omni-Sensing.
När bilen har nått destinationen kan I2V få tillgång till SAM för att skanna efter lediga parkeringsplatser och parkera bilen åt föraren i parkeringssituationer som är särskilt svårmanövrerade.

