
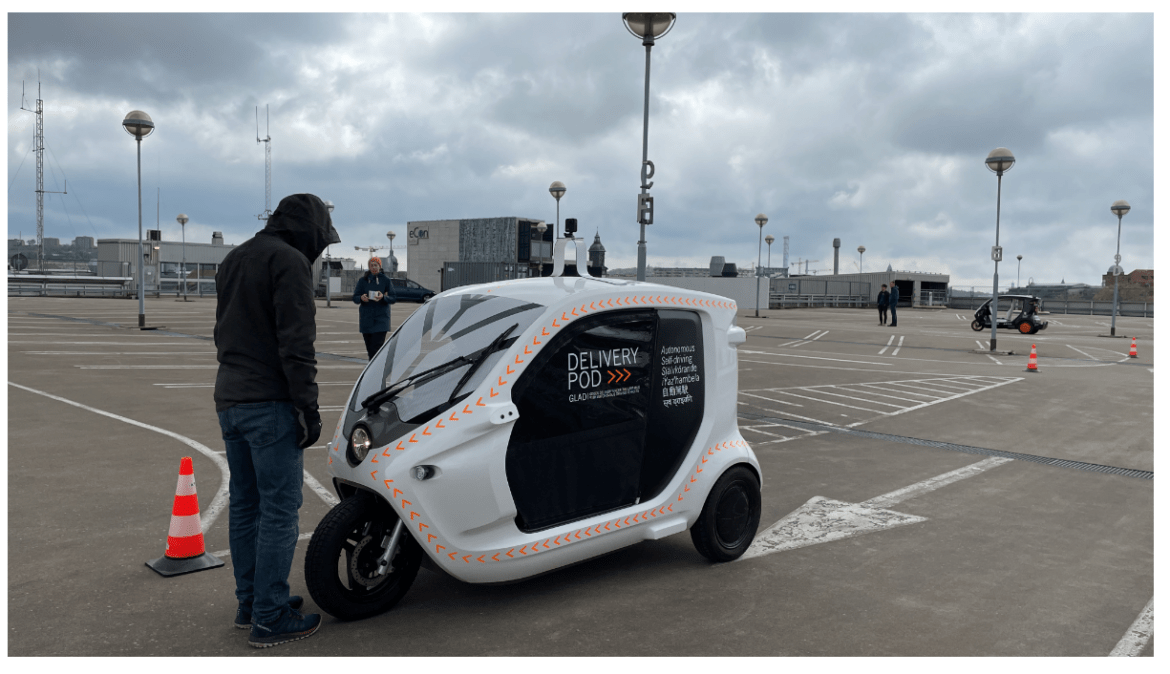
Hur kan självkörande fordon genom sitt agerande i trafiken interagera med fotgängare? Det har forskningsprojektet GLAD (Goods delivery under the Last mile with Autonomus Driving vehicles) undersökt. En studie med självkörande leveransfordon och fotgängare genomfördes på Nordstans tak i centrala Göteborg.
Projektet GLAD har som mål att undersöka och skapa kunskap om tillit och acceptans för självkörande leveransfordon i Sverige. Projektet finansieras av Trafikverket och nu har RISE, Aptiv, Clean Motion, Combitech och Högskolan i Halmstad genomfört en användarstudie på Nordstans garagetak.
– Vår utgångspunkt i den här studien har varit att man kan stödja trafikinteraktion utifrån fordonets rörelsemönster inklusive inbromsning och placering i körfältet, något som också styrks av våra preliminära resultat, säger Azra Habibovic.
Syftet med studien var att på ett kontrollerat sätt undersöka hur fotgängare interagerar och upplever små självkörande leveransfordon. Varje fotgängare fick uppleva olika trafiksituationer och göra en tolkning av fordonets avsikt i de givna situationerna. Fordonets körbeteende var designat att på olika sätt kommunicera fordonets avsikt som exempelvis att ge företräde till en fotgängare. Studien pågick i två dagar och involverade studiedeltagare från allmänheten.
– Ett självkörande fordon som på ett tydligt sätt kommunicerar sin avsikt väntas bli mer pålitligt och lättare att acceptera i samhället, säger Azra Habibovic, seniorforskare på RISE.
Det finns dock utmaningar kring detta då rörelsemönster kan tolkas på olika sätt i olika situationer. Trafikinteraktioner av dessa slag är något som utforskas av Victor Fabricius, institutsdoktorand vid RISE och Högskolan i Halmstad.
För Aptiv som utvecklar sensorer och algoritmer för självkörande teknik är insikterna från studien värdefulla och ger en känsla av hur körbeteendet kan användas som en del av kommunikationen med omgivningen.
 – För oss är det viktigt att testa tekniken noga innan vi tar det till verklig trafik och att få återkoppling från allmänheten i ett tidigt utvecklingsskede är värdefullt, säger Henrik Clasen, Technical Manager Safety Systems på Aptiv.
– För oss är det viktigt att testa tekniken noga innan vi tar det till verklig trafik och att få återkoppling från allmänheten i ett tidigt utvecklingsskede är värdefullt, säger Henrik Clasen, Technical Manager Safety Systems på Aptiv.
Med sin existerande teknik för koordinering av självkörande fordonsflottor, ATMS (Autonomous Transport Management System), vidareutvecklar Combitech förmågan att hantera godsleveranser för självkörande fordon.
– Att få testa att skicka transportuppdrag och andra kommandon till fordonen i en realistisk kontext är värdefullt för att utvärdera och förbättra vår lösning, säger Gustaf Bergström, Software Engineer på Combitech.
Clean Motion ser en framtid där små självkörande leveransfordon är en del av leveranskedjan i Sverige, speciellt när det gäller leveranserna under den första och sista milen.
– För att detta ska bli verkligt är det viktigt att dessa fordon beter sig på ett accepterat sätt i trafiken. Att vi kunnat testa detta just på Nordstans tak är fantastiskt då det är unik miljö i centrala Göteborg, säger Christoffer Sveder, Director Commercial Operations från Clean Motion.
Forskningsprojektet GLAD studerar helheten, från teknik och interaktionen människa-maskin, till affärsmodeller och krav på den digitala och fysiska infrastrukturen.
– Det kommer ge unik kunskap till industrin, infrastrukturhållare, myndigheter och forskarvärlden, vilket är för oss på Trafikverket viktigt att stödja, konstaterar Trafikverkets strateg Hamid Zarghampour.

